Client: Florida Institute of Technology
Date: February 16, 2018
Categories: Robotics / Simulation
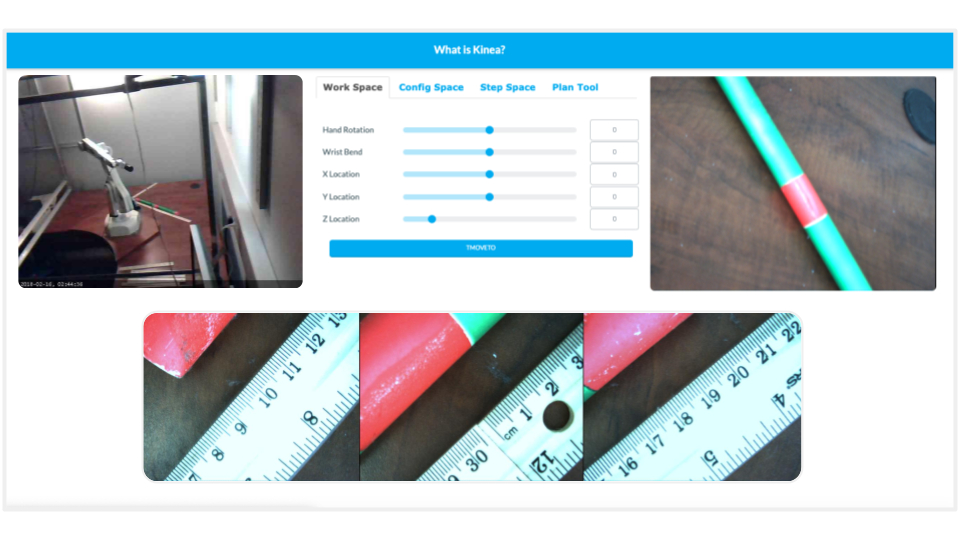
We created a mobile interface to manipulate a 5-DOF serial chain R-12 Firefly robotic arm. The objective was to utilize algorithms for object detection followed by forward-kinematics and inverse-kinematics. This remote robotics prototype successfully manipulated the camera to scan target objects.